
Remote operation is a ‘new’ term within the relatively new world of connected and automated vehicles (CAVs). It is a term that has been used elsewhere in mining, military, shipping and other applications – and if you are from the US you might recognise it as tele-operation – but not previously within the automotive sector.
Conversations around defining a common understanding of the terminology and taxonomy relating to remote operation have begun. While remote operation seems to have become an umbrella term in this space1, other terms sit within it and appear to be understood differently by different parties.
Here we consider the terms that have appeared in discussions and articles in this space, in an attempt to understand how they fit together and where distinctions and overlaps exist, as illustrated in a Venn diagram below. The aim is to start conversation about creating a common understanding of their use and application.
It is also worth noting that this article considers only the art-of-the-possible for remote operation. The safety implications of remote operation, in various formats, will be discussed in future articles.
We have included an alphabetical, but unranked, list of terms we have encountered in conversations with stakeholders and articles below:

It is worth mentioning at this point that the Venn diagram below has changed shape many times and likely will again following your input. But for each of the terms an attempt is made to explain how we currently see them fit together within a Venn diagram.
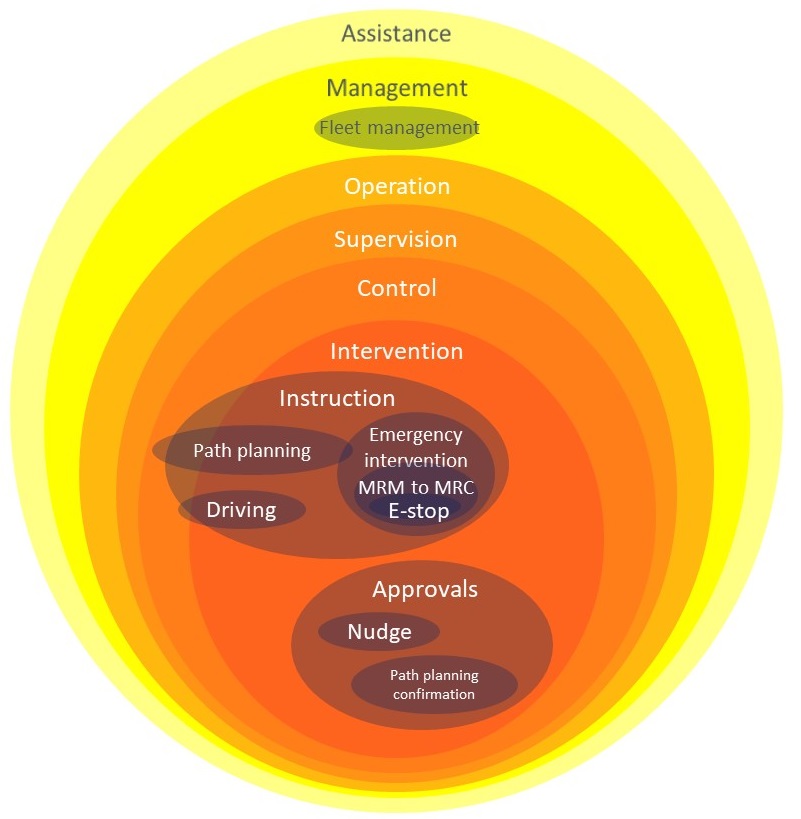
The terms ‘assistance’ and ‘management’ are difficult terms to pin down – both are catch-all terms, popular with OEMs to describe various services and systems. We might consider management to refer to ‘fleet management’, a developing concept within this space, broadly used to describe the coordination and logistics of larger fleets of vehicles, but which could include more complex manoeuvres from a central ‘control centre’-type location. So while ‘remote assistance’ and ‘remote management’ are terms we are likely to see in this space, they perhaps sit in a wider context compared with remote operation.
Assistance can be provided in various ways: mandatory e-call functions and other customer care-type assistance, for example when you press the information button on a train and a remote member of staff answers your query.
Initially, we had considered the terms ‘monitoring’ and ‘supervision’ to be interchangeable. However the Oxford English Dictionary suggests there is, in fact, a difference: it defines ‘monitor’ as [to] observe and check the progress or quality of (something) over a period of time; keep under systematic review; while ‘supervise’ is [to] observe and direct the execution of (a task or activity).
Remote supervision is, therefore, likely to be more appropriate for what is intended within the CAV space as it encompasses both the observation and any resulting actions taken. This is not to say that monitoring these systems should not happen, in fact, we believe it should, just that it is not a specific component of remote operation.
Remote control in this context is taken to encompass any of the possible control actions that might arise because of supervision. At this point what we are trying to show in the Venn diagram gets a little more complicated.
Control actions may arise because of a need for intervention: for example, in an emergency or if the CAV goes beyond its ODD; or because remote driving is inherent to the mission. Control actions may also be applied via instruction or approval, where an instruction involves telling the CAV what it needs to do and granting approval gives permission to the CAV to continue on its mission.
Instruction may be a planned or unplanned part of the mission, but is necessary in order to allow the mission to continue. As such, instruction finds itself in this Venn diagram sitting both within and outside intervention. The same can be said for the path planning and driving elements – these may be part of the purpose of the mission, or they may be needed to avoid having CAVs stranded in a live lane.
Emergency interventions are considered to sit wholly within intervention and instruction. A remote operator might intervene in an emergency by using a number of methods: issuing driving commands (steering, braking, horn), overriding the CAVs planned path, selecting an appropriate minimal risk manoeuvre (MRM) to reach a minimal risk condition (MRC). Possibly the simplest, but not necessarily the safest, MRM to MRC would be pressing an emergency stop (E-stop) button (the MRM) to stop the vehicle (the MRC).
On the other hand, the system might have been able to ascertain that there was something out of the ordinary, a deviation from the ODD perhaps. This might have resulted in the system wanting to confirm its plan with a remote operator who would have access to additional information the CAV is unaware of, or unable to process, that might be necessary to make decisions on the next steps.
These might be the sort of ‘edge cases’ where remote operation could come into its own: a site banksman giving hand signals, a crowd on the road, unreported road works, an unprotected railway crossing. The CAV has to be able to work out how to navigate these obstacles, but seeks oversight from a human to confirm it is safe to proceed – a ‘nudge’ – or to confirm path planning is sensible for navigation around the obstacle.
This article forms the first part of a series from the team at TRL working on Project Endeavour, where we will explore the topics of safety, assurance and remote operation within the connected and automated vehicles domain. If you have any questions, comments or would like to express your interest in taking part in the next stages of our stakeholder engagement process on the topic of remote operation please contact us at pendeavour@trl.co.uk.
1. Based on conversations with stakeholders, presentations at conferences and seminars and related literature and definitions of terms such as ‘remote operator’ that exist in standards and guidance such as the BSI CAV Vocabulary v3.0:2020-10.