
This article is a sequel to a previous blog (Lawson 2021) that was published as think piece at the start of research on this topic.
Connected and Automated Vehicles (CAVs) offer numerous societal benefits, however, there is still a long way to go before CAVs can be considered reliable and safe. Even when CAV technology has matured and SAE (Society of Automotive Engineers) Level 4 and 5 vehicles are more readily available, there will be scenarios that require human intervention due to a failure, or situations outside of the vehicle’s Operational Design Domain (ODD), or to support users. TRL has been conducting research on this human intervention activity which has to date been referred to as remote operation of CAVs. One of the early findings of our research is the diverse interpretation of the term remote operation and the lack of clarity and consistency of other terms in this space. This article outlines the challenges and current definitions used, as identified from the research, and seeks to propose a set of definitions for the classification of remote operation activities. It is anticipated that as CAV technology matures, and the use of remote operation evolves, the taxonomy will need reviewing and updating to include additional activities.
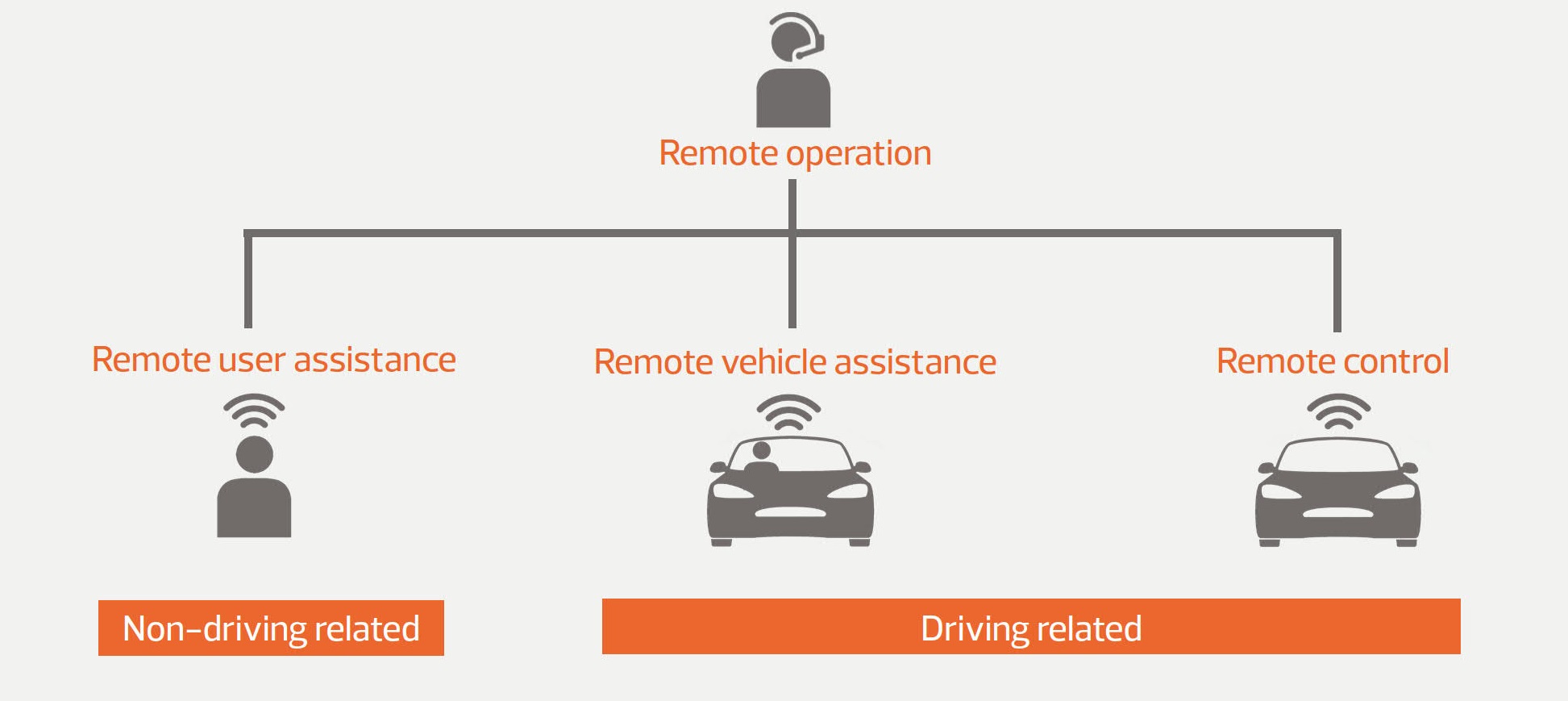
Proposed classification of key activities involved in remote operation
Our research investigated the various definitions of remote operation used by the industry. The themes that emerged were “Location of the operator with respects to the proximity to the vehicle or the driving controls”, “Classification of activities”, and “the authority or level of control of the activity”. These themes were used to define some of the core activities described below; the activities have been separated into driving or automated vehicle (AV) support activities.
Remote operation
Proposed as an umbrella term that encompasses the functions needed to support the operations of an AV or a fleet of AVs by a remote operator¹. Remote operation might include both driving and non-driving related tasks as shown in Figure 1.
Remote user assistance
Describes a range of services that can be provided by a remote operator¹ to support the welfare of the user of an AV, including answering occupant queries, or providing guidance in the event of an emergency. It does not require an oversight of an AV’s operation. This is similar to the concierge service already provided by a number of OEMs.
Remote vehicle assistance
Is likely to involve an intermittent oversight of an AV’s operation and assistance from the remote operator¹ to ensure safety is not time critical. Assistance is provided in response to a request from the AV once an issue has been encountered and the Minimal Risk Condition (MRC) achieved. Assistance might include providing an ADS with instructions to ‘nudge or manoeuvre’ an AV around an obstacle, or providing approvals or permissions to facilitate a trip continuation. This does not include providing instruction regarding selection of destinations or trip initiation timing (i.e. dispatch services).
Remote control
Describes continual oversight of an AV’s operation by a remote operator¹ who performs a potentially safety-critical role. This might include a requirement to intervene and could range from pressing an emergency stop button (remote intervention) to performing the full dynamic driving task (remote driving), given the circumstances.
Methodology
Our research investigated, through a systematic literature review, the various terminology used for the remote operation and the challenges associated with the use of inconsistent terminology. TRL also conducted interviews with national and international stakeholders from different industries associated with CAV development and remote operation experience, to gain an in-depth understanding of remote operation, use cases, challenges and potential solutions.
Challenges and the need for consistent terminology
The initial findings from our research show that current regulations, standards and guidance do not address specific roles and tasks that characterise remote operation. In addition, when terms are well-defined within standards and regulations (e.g., user-in-charge, fallback-ready user), their applicability in a remote operation context is not always clear cut. On the contrary, it results in confusion and misunderstanding for the parties involved, with different industries utilising different terms to define homologous roles and tasks.
This lack of shared understanding is likely to result in an increased risk of incidents as well as presenting operating limitations, as different roles and responsibilities are not defined and agreed upon among industry. This is particularly important considering the legal implications that inconsistent terminology can have.
Furthermore, the lack of shared understanding and confusing terminology may have a negative impact on the uptake of such technologies. The diversity of terminology means the opportunities to learn across/from other industries may be limited. Therefore, there is an urgent need to focus on the taxonomy and definition of the terminology for remote operation to maximise the uptake of this technology. Clear definitions would help outline responsibilities for the parties involved, therefore facilitating the attribution of liability in the event of incidents or malfunction.
Under the current legislation, it emerged that it would be challenging to understand where the responsibility lies given the confusion about the roles and the relative tasks to perform. Additionally, clear definitions would enable more robust systems to be developed and deployed; minimise risk in operations, allow to build requirement and associated approval/testing procedures, encourage a uniform understanding and facilitate cross company/country learning. Although some attempts have been made to incorporate remote operation into existing standards and guidance, there has not been a unified and coherent effort to define ‘remote operation’.
Less adopted definitions
Instances of the use of remote operation-related terminology have begun to appear in associated standards and regulation. In the UK the Code of Practice for Automated Vehicle Trialling (DfT 2019) refers to ‘remote-controlled operation’, while the latest British Standards Institution (BSI) (BSI 2020a) CAV vocabulary defines a remote operator as “an operator that oversees some or all of the operation of an automated vehicle from a remote location”. BSI PAS 1881 also sets out guidance for the operational safety case involving remote operators (BSI 2020b). The 2021 update to SAE J3016 (SAE 2021) includes definitions of three roles that can be performed remotely; it defines a ‘remote driver’ as:
“A driver who is not seated in a position to manually exercise in-vehicle braking, accelerating, steering, and transmission gear selection input devices (if any) but is able to operate the vehicle”.
A dynamic driving task ‘fallback-ready user’ is defined as:
“The user of a vehicle equipped with an engaged level 3 ADS feature who is able to operate the vehicle and is receptive to ADS-issued requests to intervene and to evident DDT performance-relevant system failures in the vehicle compelling him or her to perform the DDT fallback”.
And a ‘driverless operation dispatcher’ is defined as:
“A user(s) who dispatches an ADS-equipped vehicle(s) in driverless operation”.
At the time of our research, from literature review and stakeholder interviews it does not appear that these terms have been widely adopted among industry.
¹A remote operator might include a human that can be within the vehicle (but not seated in the driver’s seat) or outside of the vehicle, within line-of-sight of the vehicle, or beyond line-of-sight of the vehicle.
²Remote user assistance might include assistance to occupant(s) inside the vehicle, other road user(s) outside the vehicle, or emergency services call handler/dispatcher.
This article seeks to promote discussion with the aim of working towards a collective agreement and understanding from both the industry and public. We actively encourage you to engage with us on this topic bycompleting a short survey.
References
- BSI (2020a). Connected and automated vehicles –Vocabulary v3.0. British Standards Institution.
- BSI (2020b). PAS 1881:2020 Assuring the Safety of Automated Vehicle Trials and Testing – Specification. British Standards Institute.
- DfT (2019). Code of Practice: Automated Vehicle Trialling. Department for Transport.
- Lawson A (2021). Remote Operation of CAVs – are we all on the same page? TRL Limited.
- SAE (2021). Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. SAE International, On-Road Automated Vehicle Standards Committee.