About ServCity
ServCity ws a research programme that ran 2020 to 2023, to help cities solve a problem: how they can harness the latest autonomous vehicle technologies and successfully incorporate them into a complex urban environment.
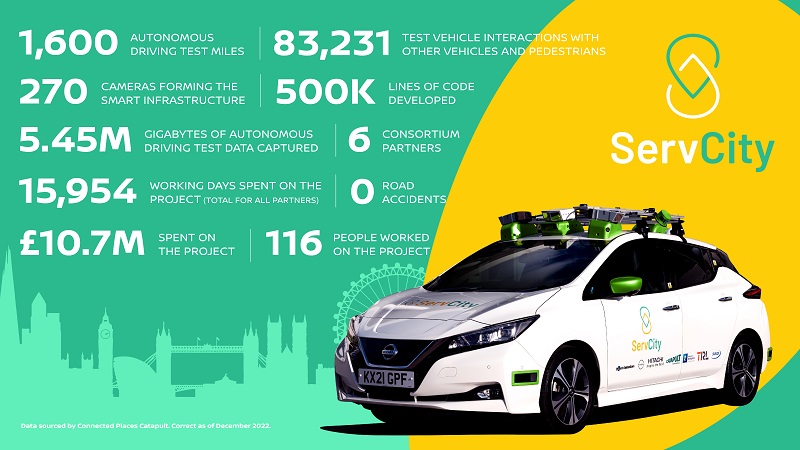
Six partners – Nissan, the Connected Places Catapult, TRL, Hitachi, SBD and the University of Nottingham – worked together to develop a blueprint that directly tackles the barriers to deploying autonomous vehicles in cities.
Through simulation, end-user experience research and real-world testing, ServCity sought to discover how cities can exploit the potential of autonomous mobility solutions and accelerate their deployment.
Vehicle technologies on board a Nissan LEAF were tested in the lab before public road testing in London at TRL's Smart Mobility Living Lab.
To advance the progress of autonomous mobility services in complex urban environments the project had to go beyond just the technology and think about the whole journey. The team concentrated on these areas:
Technology
The goal - to deploy cutting-edge technologies and next generation autonomy to overcome the complexities of automated driving in busy cities.
Firstly, we investigated how the autonomous vehicle technology can be deployed successfully in built-up areas – for example, navigating through busy streets.
And secondly, we took a system approach, exploring how infrastructure outside vehicles can support onboard technology and reduce overall cost. For example, if we install more cameras and sensors on lampposts, how does that impact on the onboard autonomous vehicle technologies?
The project built on previous research, such as the Human-Drive project, and seeing how the autonomous vehicle and city infrastructure can combine to become the next step to driving autonomously in dense urban environments.
People
The goal: to create a user experience that puts people at the centre of consideration.
Our work involved understanding and capturing how people interact with taxi services; researching the barriers to adoption of autonomous mobility services; and understanding what people need and expect from future transport services.
All with a view to creating an experience that is as intuitive, familiar and as “human-like” as possible.
Scalability
The goal: working out how to scale autonomous mobility services, identifying the most economically and technically viable areas of operation.
This part of the research programme involved understanding where demand for mobility services is likely to be highest, alongside identifying city infrastructure that already exists and how it can be adapted for an autonomous future.
We already know that resources are limited, and budget holders need to prioritise where new mobility services can have most impact.
This research will help us develop guidelines for service providers and city authorities to build the new business models to make autonomous mobility services a success.
Safety
The safety of the public and our safety drivers was of paramount importance during the trials for ServCity. The chart shows how safety was being managed and the Safety Case was administered.

Blueprint
The goal: to create a blueprint – a set of insights and guidelines – for how autonomous mobility services can become an everyday experience in our cities, for everyone. Our research findings will help provide practical guidance for policymakers, budget holders, transport providers, technology providers – and anyone with a role to play in future mobility.
The University of Nottingham Human Factors Research Group published its work on Personas & Scenarios - developed in order to communicate the potential needs of end-users of an autonomous mobility service.
The partners
Innovation is all about collaboration. The ServCity consortium comprised:
Nissan: the lead partner, responsible for providing the 100% electric Nissan LEAF as the base vehicle and creating the advanced autonomous drive technology for the research. Through its Nissan Intelligent Mobility strategy, Nissan is working towards a mobility future that is more electric, more autonomous and more connected.
Connected Places Catapult: CPC is the UK’s technology and innovation centre for Intelligent Mobility, harnessing emerging technologies to improve the movement of people and goods. The CPC supports organisations to harness emerging technologies, developing new products and services to capitalise on this global market, including Autonomous Vehicles.
Hitachi European R&D: this team focussed on meeting the complex technical challenges relating to autonomous driving in congested urban environments, including; predicting and safely responding to other moving objects such as pedestrians, cyclists and cars; as well as delivering accurate and robust localisation solutions.
TRL: our role was to develop a safe systems approach for the introduction of autonomous vehicles into normal traffic. By using the infrastructure and monitoring facilities of its Smart Mobility Living Lab in London, TRL analysed the performance and assessed the benefits of automated mobility services in a complex city environment.
University of Nottingham: UoN (via the Human Factors Research Group) has significant expertise in conducting and analysing user studies to evaluate human-computer interactions. UoN's role in the project was to generate new theories, models and methods associated with the "user experience" of vehicle occupants, ensuring the design and development of the AV service is user-centred.
SBD Automotive: this team developed and prototyped a smartphone-based app that can support users in finding, booking and using autonomous vehicles. As automotive technology consultants, SBD helps vehicle manufacturers and suppliers create smarter, more secure, better connected and increasingly autonomous cars.
The project was part-funded by Innovate UK (the UK’s innovation agency) and the Centre for Connected Autonomous Vehicles (CCAV), and led by Nissan.
Project evolution
HumanDrive used machine learning to develop natural, human-like vehicle control:
ServCity explored how to introduce an autonomous mobility service: